
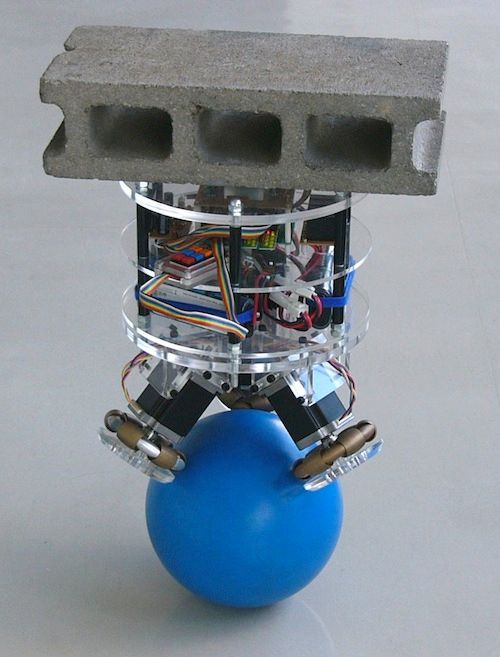
Het balanceren gebeurt door drie kleinere wielen die op de bal kunnen rollen. Hierdoor gaat de bal rollen. De robot kan niet alleen stilstaan maar kan dus ook autonoom gaan rondrijden. Je kunt dit volgens de onderzoekers voor veel verschillende dingen gaan gebruiken, zoals bijvoorbeeld om glazen op te dienen maar wat nog handiger is dat het je kan helpen om grote voorwerpen te "dragen". Je kan dan een kant laten steunen op deze robot, terwijl jij dan met de andere het vooruit duwt en stuurt.

Het balanceren gebeurt doordat een software pakket deze stappenmotoren aanstuurt. Deze haalt zijn data over de positie van de robot via gyroscopen en accelerometers. Dus wanneer je de robot een kleine duw geeft dan brengt hij zichzelf weer in een rechte, gebalanceerde positie. Ze waren genoodzaakt om zowel gyroscopen als accelerometers te gebruiken omdat de gyroscoop alleen de helling van de robot kan opmeten maar deze meting wordt beïnvloed wanneer de robot aan het versnellen of vertragen is. En omgekeerd een accelerometer kan alleen een versnelling opmeten maar deze meting wordt beïnvloed als de robot zijn helling verandert.
De robot heeft 2 control modes, namelijk een eerste waar hij op dezelfde plaats blijft staan. En als tweede zogenaamde passieve mode waar de robot er enkel voor zorgt dat hij rechtop blijft staan, dus dat je hem kunt rond duwen naar waar je ook maar wil. Echt een interessante technologie maar nu nog op zoek gaan naar meerdere toepassingen.




via [TekGek]
Geen opmerkingen:
Een reactie posten
Klik rechts onder het commentaar-kader op "Aanmelden via e-mail" indien u via mail op de hoogte wilt blijven van de nieuwe reacties op deze post.