

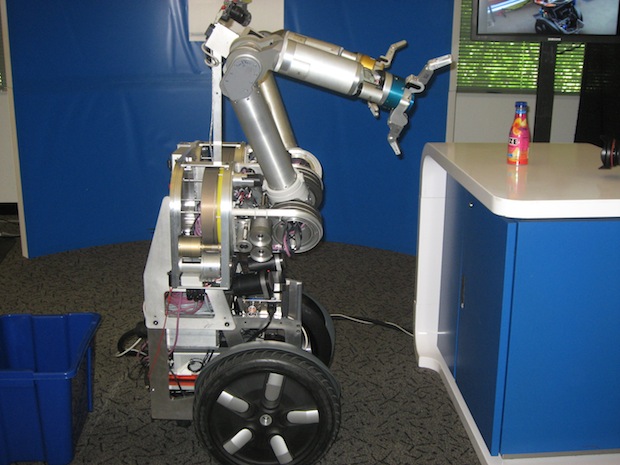
De HERB is opgebouwd uit 2 grote delen, namelijk onboard componenten en offboard componenten. De onboard componenten zijn een Segway, 2 robot armen met elk een grijper, verschillende sensoren en een aantal onboard computers. De onboard componenten kunnen via een draadloos netwerk communiceren met een PC die niet op de robot zelf gemonteerd zijn maar ergens in de kamer of het gebouw staan.
HERB bevat 3 verschillende sensoren waarmee hij de omgeving kan opnemen. De eerste sensor is een laser die onderaan op de plank tussen de wielen geplaatst is. Deze laserstraal heeft de vorm van een plat vlak en wordt gebruikt voor het bepalen van de locatie van de HERB in de ruimte en voor de planning voor welke baan de HERB zal afleggen om zijn doel te bereiken. Daarnaast staan er 2 camera's op schouderhoogte op de HERB. De ene dient voor het opnemen en herkennen van verschillende objecten in de ruimte. En de tweede dient voor extra dieptezicht in de ruimte en voor de bepaling van de locatie van de objecten in de ruimte. En de laatste sensor is bevestigd op de robotarm zelf. Deze sensor helpt bij de besturing van het grijper/hand die op het einde van de arm gemonteerd zit.
Al de informatie die opgenomen wordt door deze sensoren wordt dan verwerkt door de verschillende computers (zowel onboard als offboard). Deze computers sturen dan de Segway en de robotarm aan. De bediening van de HERB gebeurt via een ingebouwde interface die sterk gelijkt op die van een iPhone. Daarnaast kan men ook taken meegeven via het spraakherkenning-systeem.

Extra info vind je hier.
Geen opmerkingen:
Een reactie posten
Klik rechts onder het commentaar-kader op "Aanmelden via e-mail" indien u via mail op de hoogte wilt blijven van de nieuwe reacties op deze post.